|
|

| |
.Alternate Interfaces
| 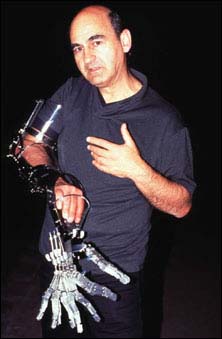 | Extended Arm The EXTENDED ARM is constructed with the aesthetic of the THIRD HAND, using materials like stainless steel, aluminium and acrylic. The pneumatics are all for the operation of the manipulator. It is a five-finger human-like hand with some novel capabilities. Its functions include wrist rotation, thumb rotation, individual finger flexion with each finger splitting open. Each finger can become a gripper in itself. The EXTENDED ARM acrylic sleeve fits over the right arm whose fingers rest on an array of 4 switches allowing the actuation of pre-programmed sequences of motion of the manipulator. The right arm becomes primate in proportion. The first performance was in Avignon as part of a program called Mutalogues, organised by AVIGNONumerique. It was a continuous 4 hour event which allowed people to circulate and come and go in the small gallery space. Whilst the right arm was extended and automated the left arm was moving involuntarily to 8 channels of muscle stimulation, allowing not only bending of the arm and wrist with deltoid, biceps, flexor and extender muscles but also activating some individual finger flexions. A split body both automated and involuntary. Again the pneumatic sounds and the finger clicks were amplified acoustically and the switch signals were used to trigger synthesised sounds. The performance rhythms were thus largely orchestrated by not only the visual choreography, but also by the sounds. On the far wall a large shadow was cast of the body and its extended arm. On the RHS wall is projected the live video mix of 4 camera views, including a camera positioned above the body and a hand-held camera for improvised, close-up slow-motion shots. On the LHS wall was projected a VRML model of the manipulator that was looping a sequence of movements, sometimes mimicking the physical object. Click here to see a flash version | 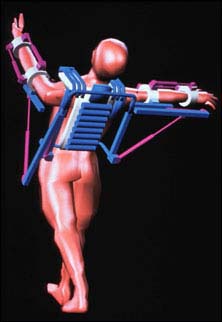 | Movatar MOVATAR is an inverse motion capture system. Instead of a body animating a computer entity, it allows an avatar to perform in the real world by possessing a physical body. The MOTION PROSTHESIS interface which wraps around the upper torso has only 3-degrees-of-freedom for each arm but this allows 64 possible combinations. The body is split not from left to right but from torso and legs. Whilst the arms are actuated by the avatar's code, the legs are free to move, turn and press floor sensors that in turn can modulate the avatar's behaviour. Changes in rhythm, mutation and complexity of posture strings, for example, can be affected. The MOTION PROSTHESIS can be seen as the muscles of the avatar in the real world. This is a virtual/actual interface where a dialogue is generated. Whereas in Fractal Flesh, the body becomes a host for a remote and alien agent (a person who is in another place) here the body shares its agency with an artificial entity. A virtual body which is capable of evolving behaviour. The avatar is a kind of viral life form. It is benign and passive as a computer entity, but when it has a body as a host it can affect behaviour. It is visualised as a doppelganger human in form and limb movements. |  | Exoskeleton EXOSKELETON is a jerky and powerful 600kgm machine. It is stiff-jointed, requiring 18 pneumatic actuators to drive the 3 degree-of-freedom legs. It pounds and scrapes the ground and on concrete it can grind the surface and send up puffs of dust. In fact the impact of the legs striking the ground necessitated the wearing of shock-proof boots, one of the reasons the performer was clothed for the first time in about 30 years. But the robot does walk forwards and backwards with a kind of ripple gait and sideways left and right with a tripod gait. It can turn, squat and stand as well as sway from side to side. The body is positioned on a turntable that can rotate, adding another motion in the choreography of the machine. The body is a passenger but with an exoskeleton wrapped around its upper torso and magnetic sensors on each jointed segment, arm gestures can select the mode and direction of locomotion. This also makes the body visually more a part of the machine. The performance is simply a walking performance. In Bern at Dampfzentrale, as part of Cyborg Frictions, the event lasted about 45 minutes. When the audience comes into the space the artist climbs onto the robot and gets attached to the exoskelton by 2 assistants. The performance begins by initiating a stomping motion of the legs and then the walking begins. It's largely improvised with the grid of lights overhead accommodating its position in the space. The machine is either walking out of the light into darkness, or out of the darkness into the light. No other pyrotechnics. As well as paying attention to the mode and direction of locomotion, the artist is also listening to the sounds. Composing the sounds means choreographing the movements of the machine. The compressed air sounds, relay switch clicks, and the impact of the legs hitting the ground are acoustically amplified. These sounds are augmented by the clicking and rotating actions of the large manipulator which extends the exoskeleton. Rhythmic loops of sounds can be generated by repetitive finger movements of the manipulator. As well, the switch signals are used to generate synthesised sounds to create a counterpoint to the industrial sounds of the robot. | | Credits Stelarc
Principal Research Fellow
Visual and Performing Arts
Digital Research Unit
The Nottingham Trent UniversityStelarc is also Honorary Professor of Art and Robotics at Carnegie Mellon University in Pittsburgh USA
He has been awarded a Doctor of Laws, an honorary degree from Monash University in Melbourne Australia
His artwork is represented by The Sherman Galleries in Sydney ALTERNATE INTERFACES CD-ROM
Daniel Frazer - Design Programming
Marcel Thomson - Research Assistant (DRU)
Lee Stirling - Sound Editing
Ralph Bendel Hopkins - Assistance EXTENDED ARM
Manipulator Construction - Jason Patterson
Pneumatic System - Jan Cummerow
Controller and Programming - Lars Vaupel This project was first researched during an Australia Council Visual Art/Crafts Board Fellowship.
Funding to complete the pneumatic system and controller was provided by AVIGNONumerique
for the program 'Mutalogues'. It was first performed in Avignon on the 5th May, 2000 MOVATAR
Concept and Performance - Stelarc
Graphics + Director/VRML Programming - Gary Zebington
AI Director, Midi + Java Programming - Damien Everett
Sound + Technical Design - Rainer Linz
Website Movatar Animations - Steve Middleton
Website Sound - Andrew Garton The first performance was for Cybercultures at the Casula Powerhouse in Australia EXOSKELETON
Concept and Performance - Stelarc
Walking Machine Design/Construction - Tom Diekmann, Stefan Doepner, Gwendolin Taube
Electronics and Programming - Lars Vaupel
Technical Assistance - Joy Wagner
Manipulator Construction - Jan Cummerow
Programming - Ulf Freyhoff
Computer Simulation - Steve Middleton This project was sponsored by SMC Pneumatics and coordinated by Eva Diegritz as a
co-production of Kampnagel Hamburg, F18 and Diekmann Enterprises.
It was first performed at Kampnagel Hamburg on the 5th November 1998. |
|
|
|