
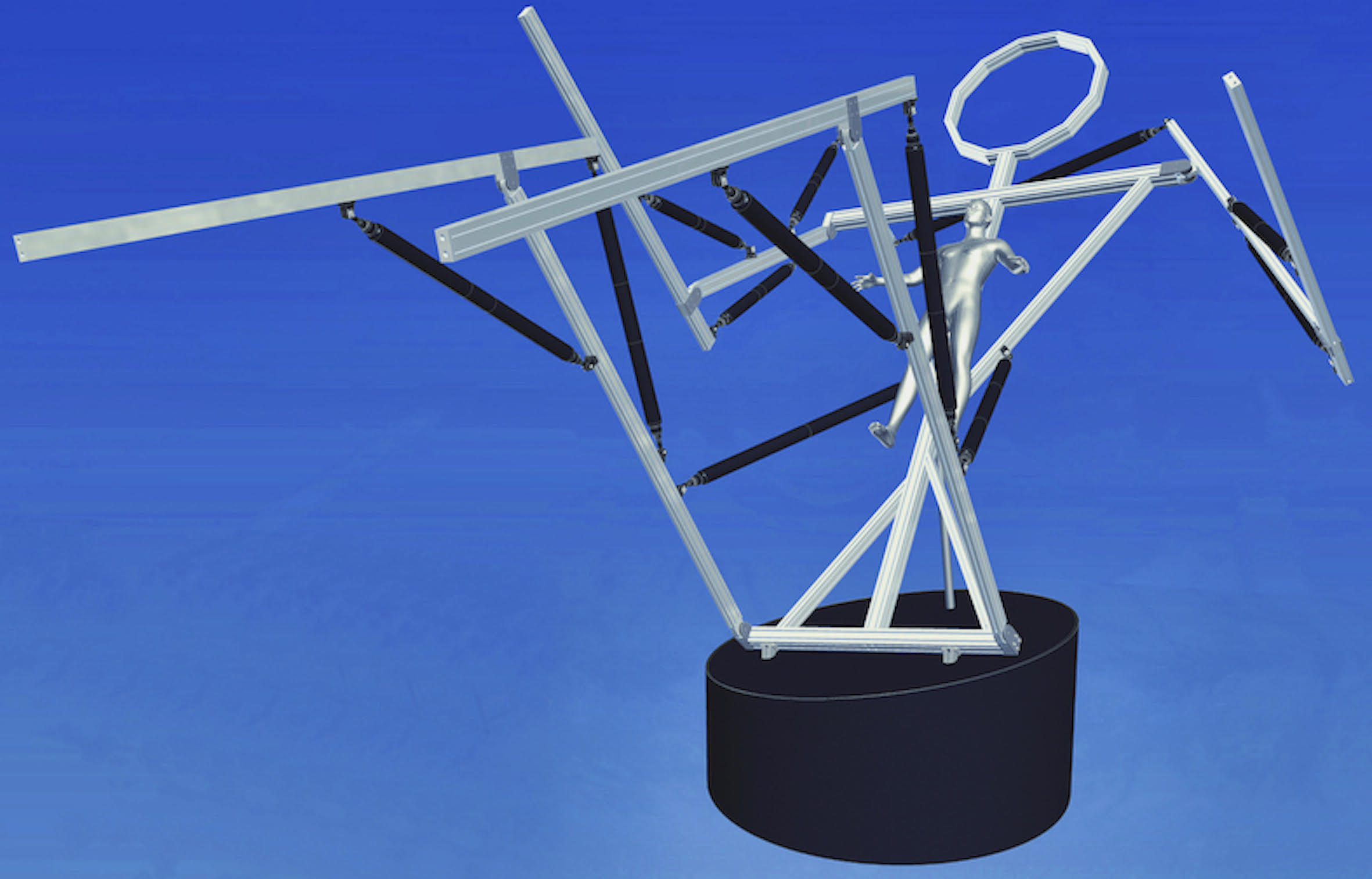
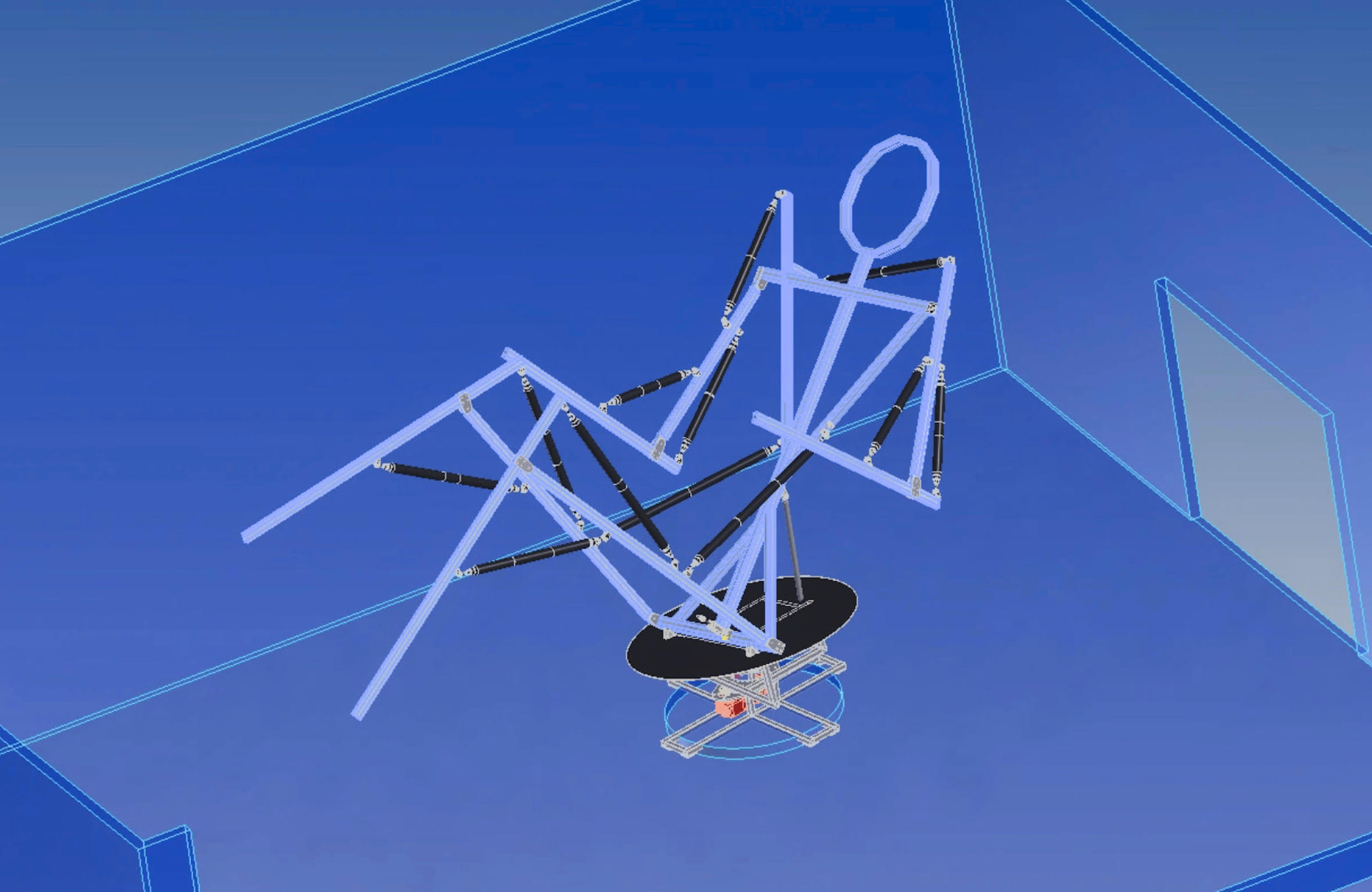
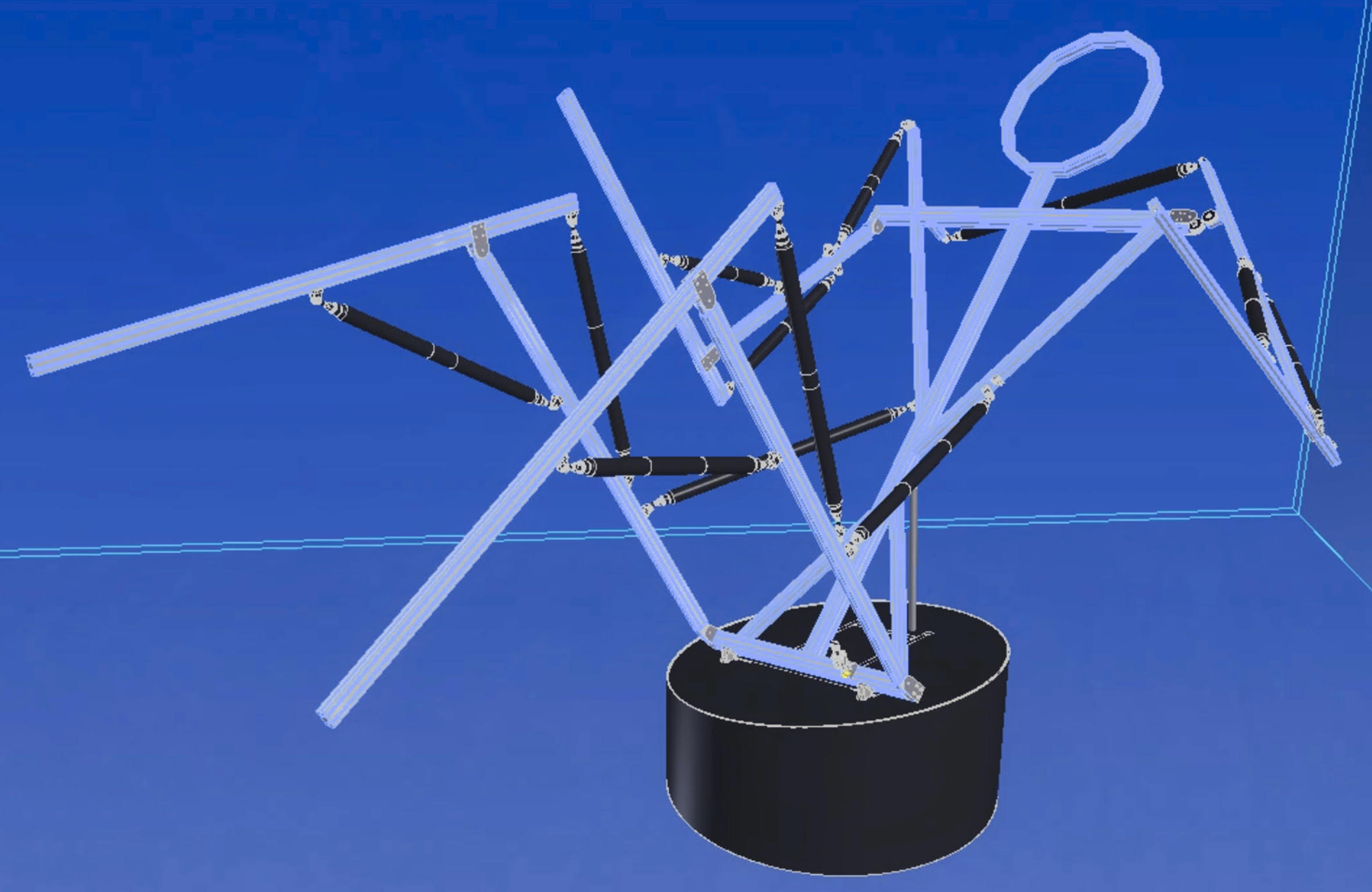


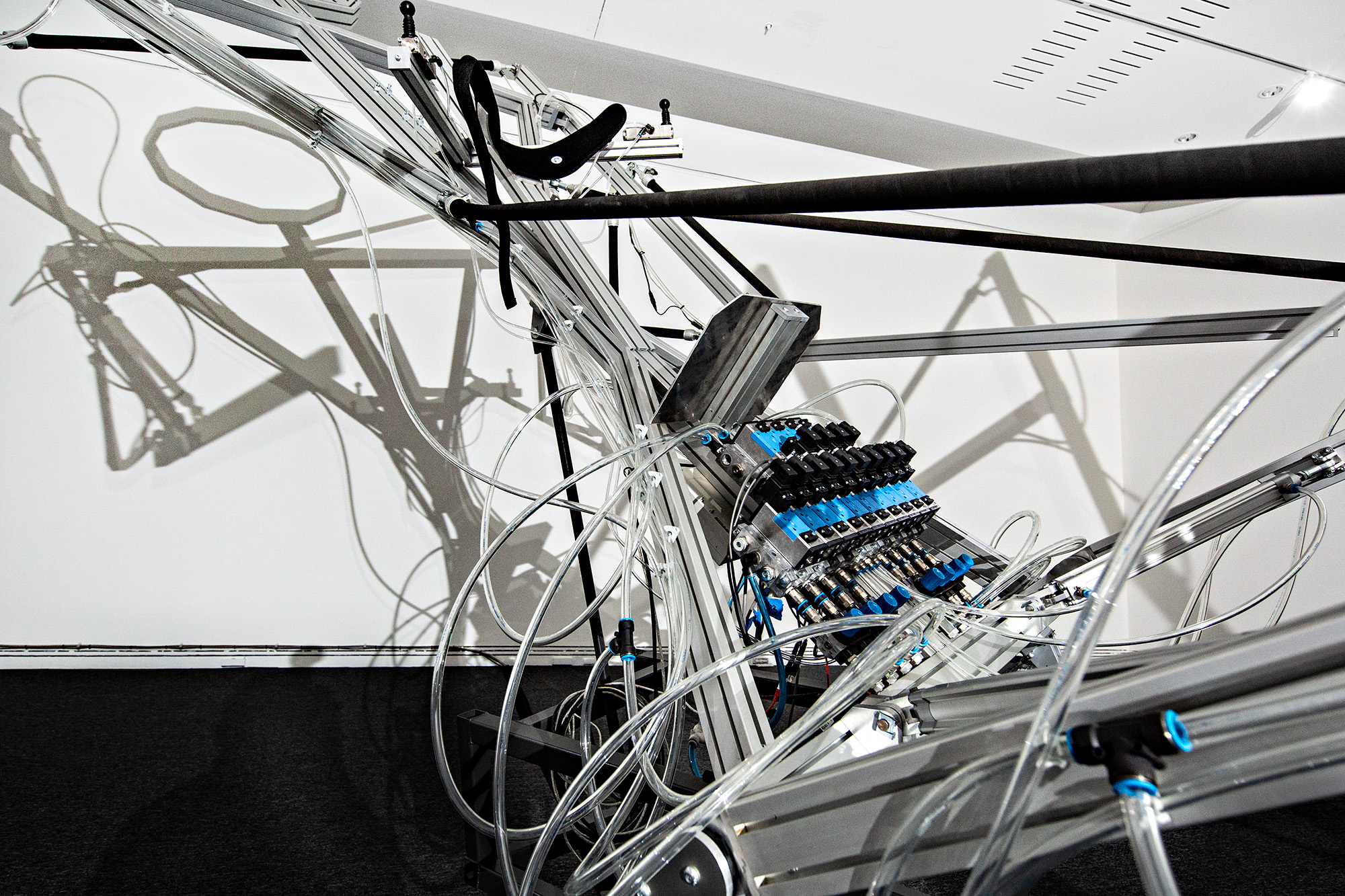







Reclining StickMan is a 9m long robot, actuated by antagonistically bundled pneumatic rubber muscles. Visitors at the AGSA can insert their own choreography from a control panel. Anyone, anywhere at any time can remotely access and actuate the robot. A background algorithm intermittently animates the robot if no one intervenes. The droning motor sounds, the solenoid clicks and the muscles compressing and contracting, extending and exhausting are amplified, registering the limb motions and extending the physical presence of the robot.
STELARC performed for 5 hours continuously positioned on the torso of the robot on Saturday 29 Feb 2020, 11.30am - 4.30pm.
Reclining Stickman will be streaming and in Exhibition from 29 Feb – 16 August 2020.
Wayne Michell, Ternay - Design Engineering
Mark Harrison, Festo - Pneumatic muscles and technology
AITI, Flinders University - Robot fabrication
Steve Berrick - Interactive software and electronics
Special thanks to Leigh Robb, Curator 2020 Biennial of Australian Art
Erin Davidson, Project Officer
Dan Von Schutt and the Installation Team, AGSA

| © 2017 STELARC | Web: Andreas Lustig |